This function returns the environment called pkg_env created by the package. It's useful for debugging and checking. It's an internal function, not thought to be used by students, but can be used with karel:::get_pkg_env().
Detalles
pkg_env is an environment created inside the package to store
and share between functions all the objects related to Karel's world and
its state. Since the functions that will be used by the students should be
simple and without arguments (for example, move()), these functions
modify internally pkg_env.
The components of this environment are:
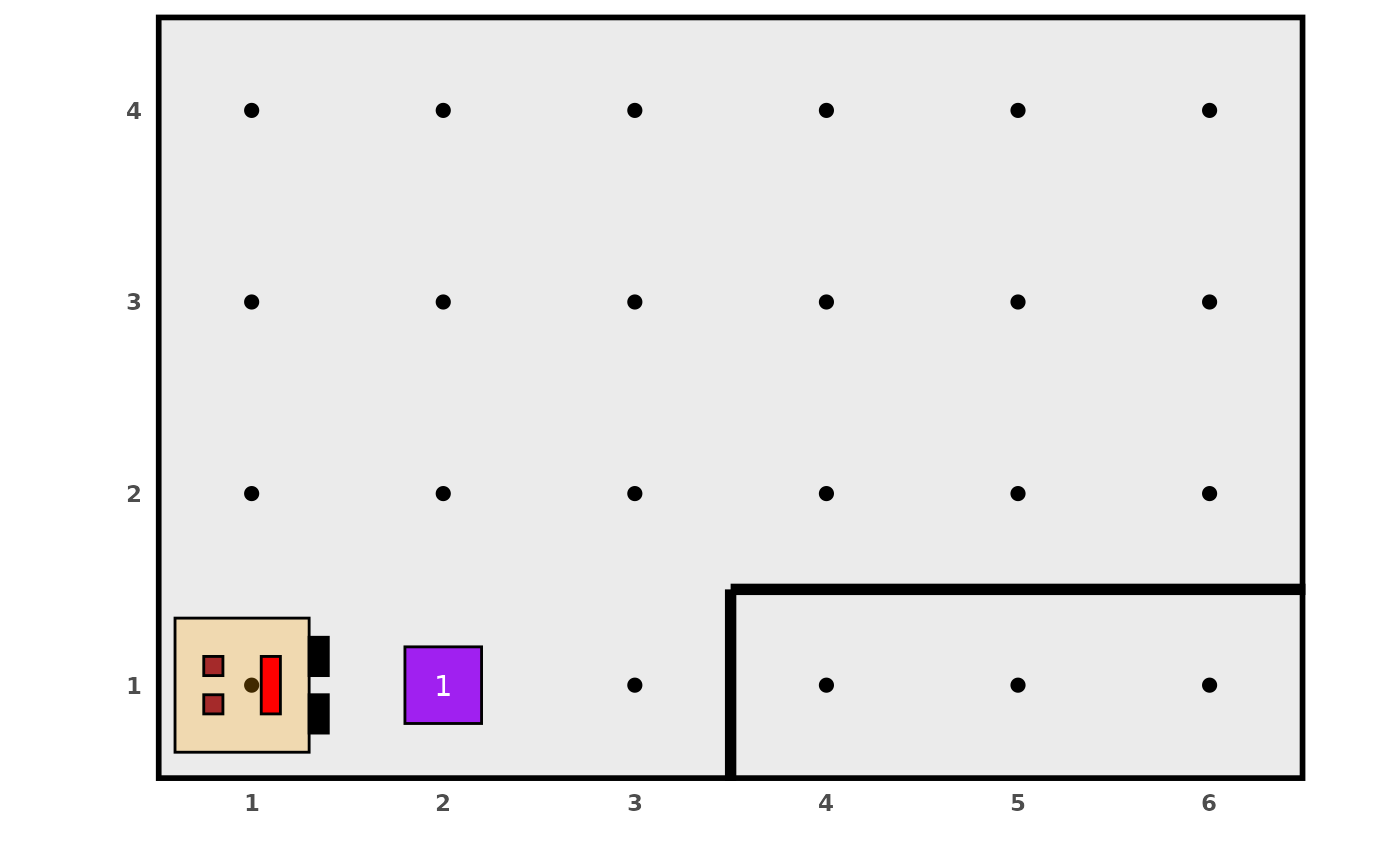
nx: size of Karel's world, number of cells in x-axis.ny: size of Karel's world, number of cells in y-axis.hor_walls: a data.frame with a row for each horizontal wall in Karel's world and 3 columns: x (coordinate of the start of the wall in the x axis), y (coordinate of the start of the wall in the y axis), lgth (length of the wall, in number of cells it covers). If it is NULL, there are no horizontal walls in the world.ver_walls: a data.frame with a row for each vertical wall in Karel's world and 3 columns: x (coordinate of the start of the wall in the x axis), y (coordinate of the start of the wall in the y axis), lgth (length of the wall, in number of cells it covers). If it takes the value NULL, there are no vertical walls in the world.open_moves: a nx x ny x 4 array of TRUE/FALSE values indicating if Karel can move to each direction from a given position. For example, if Karel is in the bottom left corner, which is cell [1, 1], it can't go south or left, so we have both open_moves[1, 1, 3] and open_moves[1, 1, 4] set to FALSE. Depending on the existing walls it could move south or north, so open_moves[1, 1, 1] and open_moves[1, 1, 2] could be TRUE or FALSE. Taking into account the size of the world and the walls, this array is created by the internal functiongenerate_open_moves.karel: a data.frame with a row for each moment, in which each state of Karel is recorded throughout the execution of its actions. It has 4 columns: karel_x (Karel's x-axis coordinate), karel_y (Karel's y-axis coordinate), karel_dir (the direction Karel is facing, 1 east, 2 north, 3 west, or 4 south), and moment (integer value indicating each moment).dir_now: current Karel's facing direction.x_now: x-axis coordinate of Karel's current position.y_now: y-axis coordinate of Karel's current position.moment: current moment (integer value).beepers_any: total amount of beepers present in the world at this moment.beepers_bag: number of beepers that Karel has available in its bag at the moment. Karel can put beepers if it has beepers in its bag. It can take the value Inf.beepers_now: a data.frame with as many rows as cells with beepers in the world and 5 columns:xandyfor the coordinates of the cell,cellis the number of the cell counting as cell number 1 the cell in the bottom left corner and going upwards by row (meaning cell number 2 would be the cell in coordinates x=2 and y=1),nthe number of beepers in this cell andmomentthe moment in which this state of the world corresponds to. It is created by the internal functioncreate_beepers.beepers_all: a data.frame with the same structure asbeepers_now. Whilebeepers_nowonly has current state of beepers,beepers_allacummulates all states for the animation, binding the rows ofbeepers_nowandbeepers_allafter each action.base_plot: the initial plot of the world, with its size and all the walls if there are any. It doesn't show Karel or the beepers, since those things can change with time. This is the base plot that is used later to produce the animation. This plot is created by the internal functionplot_base_world.
Ejemplos
generate_world("mundo001")
 if (interactive()) karel:::get_pkg_env()
if (interactive()) karel:::get_pkg_env()