Introduction
The purpose of this vignette is to get you up-to-speed with the basics and provide useful links for doing transport research with R.
stplanr was initially developed to answer a practical question: how to convert official data on travel behaviour into geographic objects that can be plotted on a map and analysed using methods from geographical information systems (GIS)? Specifically, how can origin-destination (OD) data, such as the open datasets provided by the UK Data Services WICID portal (see wicid.ukdataservice.ac.uk/), be used to estimate cycling potential down to the street levels at city and national levels? The project was initially developed to support the Propensity to Cycle Tool (PCT), which has now been deployed as a national web application hosted at www.pct.bike and written-up as an academic paper (Lovelace et al. 2017).
stplanr has since grown to include a wide range of functions for transport planning. The package was reviewed through the rOpenSci package review process and the package is now hosted on their site. See the website at docs.ropensci.org/stplanr. A more detailed overview of the package’s aims and capabilities is contained in a longer vignette, which has since been published in the R Journal (Lovelace and Ellison 2018).
Installing stplanr
If you’re new to programming and transport data, we recommend using stplanr interactively in an Integrated Development Environment (IDE), RStudio. Broader guidance on R set-up can be found in Efficient R Programming (Gillespie and Lovelace 2016), RStudio’s Education pages and on CRAN.
Once you have an R set-up you are happy with, the latest version can be installed as follows:
install.packages("stplanr")To install the development version, which may have new features, can be installed as follows:
remotes::install_github("ropensci/stplanr")Load the package as follows:
stplanr contains many datasets for testing and demonstrating how R can be used for transport planning. The names of these datasets (which are loaded ‘lazily’ into your namespace when you attach stplanr) are listed below:
data(package = "stplanr")$result[, "Item"]## [1] "cents_sf" "destinations_sf"
## [3] "flow" "flow_dests"
## [5] "flowlines_sf" "od_data_lines"
## [7] "od_data_routes" "od_data_sample"
## [9] "osm_net_example" "rnet_cycleway_intersection"
## [11] "rnet_overpass" "rnet_roundabout"
## [13] "route_network_sf" "route_network_small"
## [15] "routes_fast_sf" "routes_slow_sf"
## [17] "zones_sf"A more complete list of functions in the package can be found here: https://docs.ropensci.org/stplanr/reference/index.html.
OD data to desire lines and routes
Transport data can take many forms. R is an appropriate language for handling transport data, as it can read-in data in such a wide range of formats, e.g. with packages such as haven and foreign. This section focusses on OD datasets, and their conversion to desire lines and routes because these are foundational data types for many transport research applications. (stplanr also contains functions for: the analysis of road traffic casualty data, interfacing with various routing APIs, ‘travel watershed’ analyis and access to Google’s Travel Matrix API.)
Origin-destination (OD) data is simply data in the following form:
od_eg <- read.csv(
text =
"origin, destination, V1, V2
1, 2, 100, 3
1, 3, 50, 5"
)
knitr::kable(od_eg)| origin | destination | V1 | V2 |
|---|---|---|---|
| 1 | 2 | 100 | 3 |
| 1 | 3 | 50 | 5 |
What this example OD table means is that 100 units of ‘V1’ and 3 units of V2 travel between zone 1 and zone 2. There is also movement represented between Zone 1 and 3.
This dataset can also be represent as an ‘od matrix’, where rows represent the origins and columns destinations. However, for multiple variables (e.g. modes of transport) and to prevent giant and unwieldy sparse matrices, the ‘long’ form represented above is much more common.
Now, imagine that V1 represents the total number of people travelling between the origin and destination and that V2 represents the number who regularly cycle. From this we can get a good indication of where people cycle at the desire line level. (Note: a good source of open OD data has been made available from the wicid.ukdataservice.ac.uk website).
To extract useful information from this OD dataset, we need to be able to place the lines on the map. What kind of place does a desire line originate from? What about the destination? What is the environment like that it passes through? To answer all these questions we need a geographic representation of the OD table illustrated above.
Converting OD data to desire lines with R
One problem with OD data is that the rows do not tend to have
geography inherently built in. They could contain a variables called
lat_origin, lon_origin,
lat_destination and lon_destination. But
generally they only contain the IDs of geographic zones.
Work is needed to convert the OD data into ‘desire lines’. Desire lines are straight lines between the origin and destination and represent where people would go if they were not constrained by the route network (see Figure 3 from (Lovelace et al. 2017)).
To show how these desire lines are created, we’ll switch to using real OD data provided by stplanr. The first three of these is shown below:
## Area.of.residence Area.of.workplace All Bicycle
## 920573 E02002361 E02002361 109 2
## 920575 E02002361 E02002363 38 0
## 920578 E02002361 E02002367 10 0
## 920582 E02002361 E02002371 44 3
## 920587 E02002361 E02002377 34 0
## 920591 E02002361 E02002382 7 0This shows that, between zone E02002361 and E02002361 (i.e. intrazonal flow) there were 109 people travelling to work by all modes in the 2011 census. 2 of them cycled. The equivalent numbers for the OD pair E02002361 to E02002371 were 44 and 3. But how to make this data geographical?
For that we need another dataset, also provided by stplanr:
head(cents_sf)## geo_code MSOA11NM percent_fem avslope geometry
## 1708 E02002384 Leeds 055 0.458721 2.856563 -1.546463, 53.809517
## 1712 E02002382 Leeds 053 0.438144 2.284782 -1.511861, 53.811611
## 1805 E02002393 Leeds 064 0.408759 2.361707 -1.524205, 53.804098
## 1925 E02002367 Leeds 038 0.591141 5.091685 -1.550806, 53.824420
## 1928 E02002363 Leeds 034 0.525161 3.076791 -1.535617, 53.828473
## 1930 E02002361 Leeds 032 0.511777 3.589363 -1.516734, 53.828874The cents_sf dataset is spatial, as defined in
the sf package. The default plot() method for
sf objects creates a map, as illustrated below:
## Linking to GEOS 3.12.1, GDAL 3.8.4, PROJ 9.4.0; sf_use_s2() is TRUE
class(cents_sf)## [1] "sf" "data.frame"
plot(cents_sf)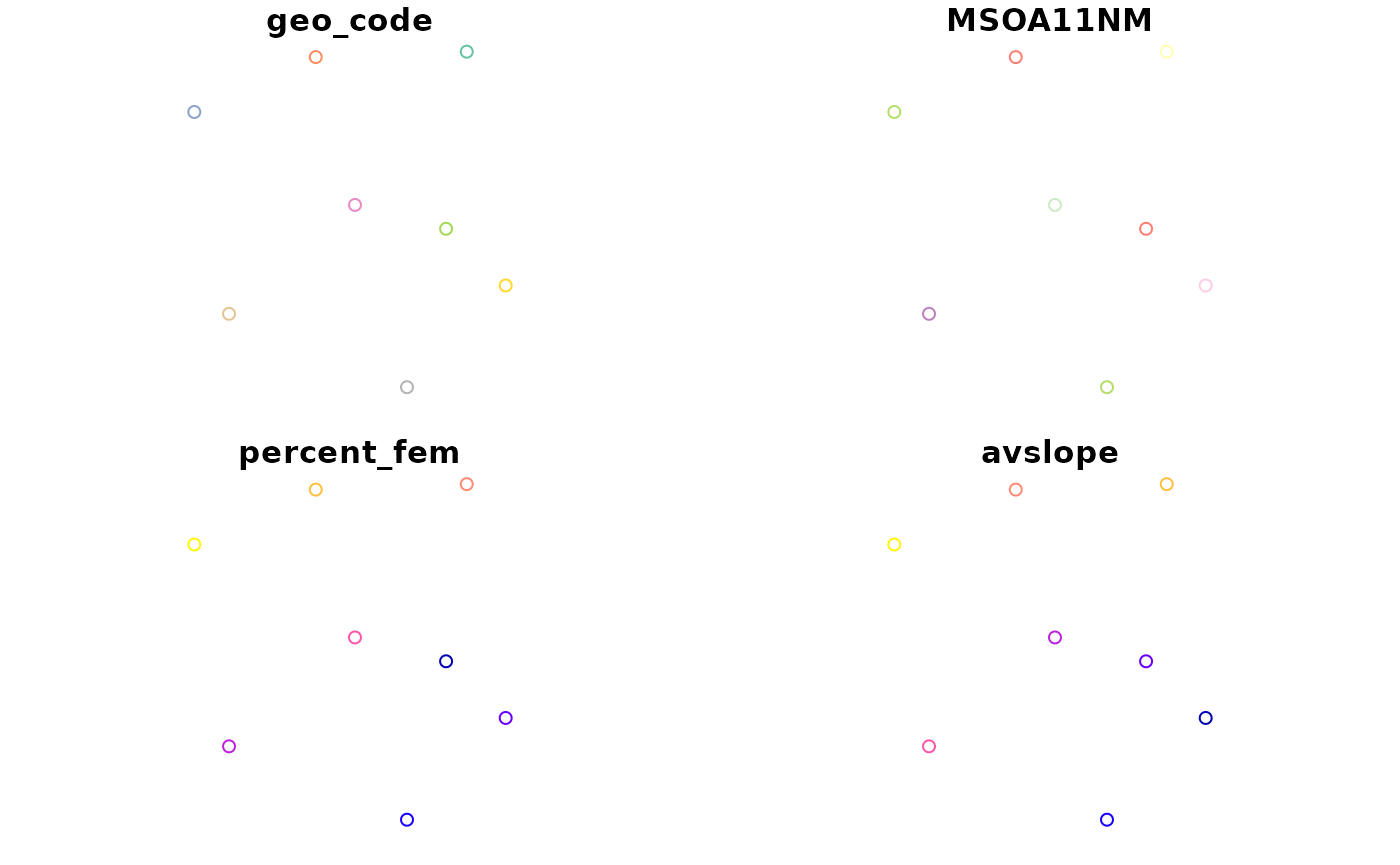
stplanr creates desire lines using the
od2line() function, which links geographical and
non-geographical datasets together. Note: this functionality has been
superseded by functions in the od package. In this case, it
will join the non-geographical flow data with the
geographical cents_sf data plotted above. Let’s take a
single OD pair, E02002361 to E02002371, the fourth row represented in
the table above, to see how this works:
flow_single_line <- od_data_sample[2:3, ] # select only the first line
desire_line_single <- od2line(flow = flow_single_line, zones = cents_sf)This can be plotted as follows:
## Warning in plot.sf(cents_sf, add = TRUE, cex = 5): ignoring all but the first
## attribute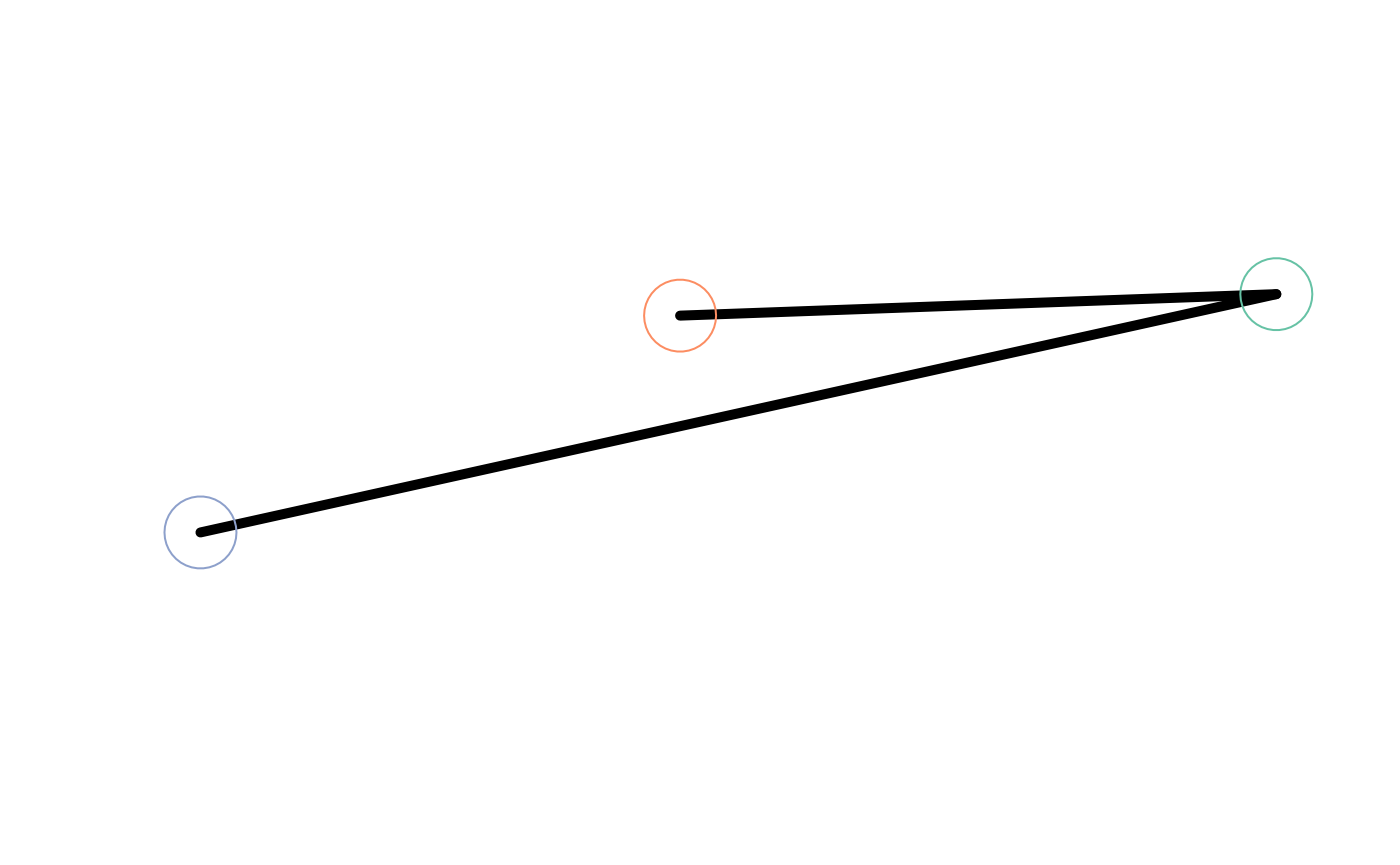
The following command creates desire lines longer than than 2km in
distance via the geo_length() function — omitting ‘internal
flows’ via the sel object below — represented in the
dataset flowlines:
l <- od2line(flow = flow, zones = cents_sf)
# identify 'intrazone flows'
sel_intra <- l$Area.of.residence == l$Area.of.workplace
# find distances
l_distances <- geo_length(l)
summary(l_distances)## Min. 1st Qu. Median Mean 3rd Qu. Max.
## 0 1097 1466 1520 2285 2935
sel_dist <- l_distances > 2000
sel <- !sel_intra & sel_dist
l <- l[sel, ]This creates the geographic data object l, which can be
visualised as follows:
plot(l)Now the data is set-up, we can change the visual appearance of the desire lines with a single extra argument passed to the plotting function. Let’s make width depend on the total number of people travelling along the desire line:
lwd <- l$All / mean(l$All)
plot(st_geometry(l), lwd = lwd)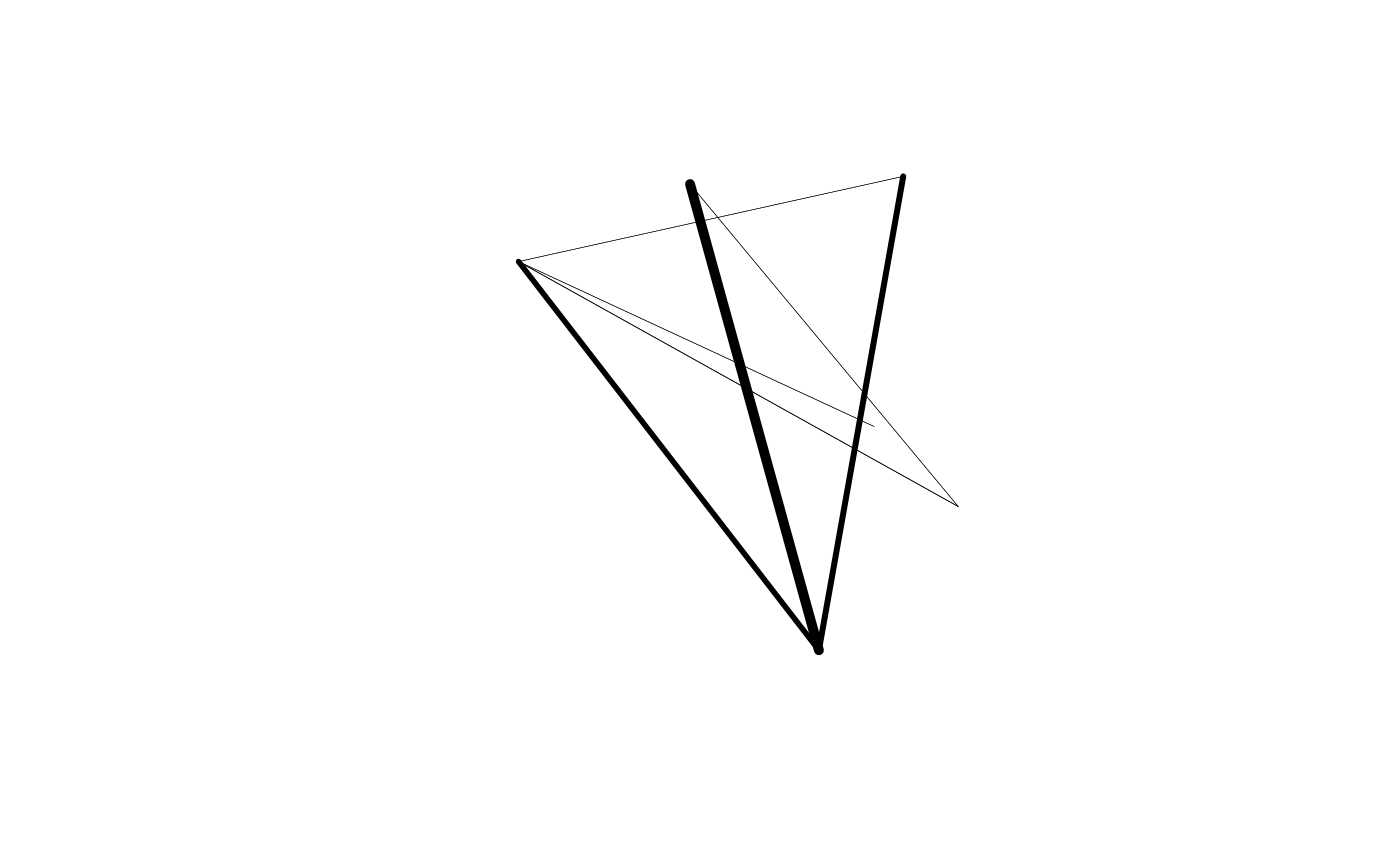
Another useful visualisation involves setting the colour relative to the number of people cycling:
plot(l["Bicycle"], lwd = lwd)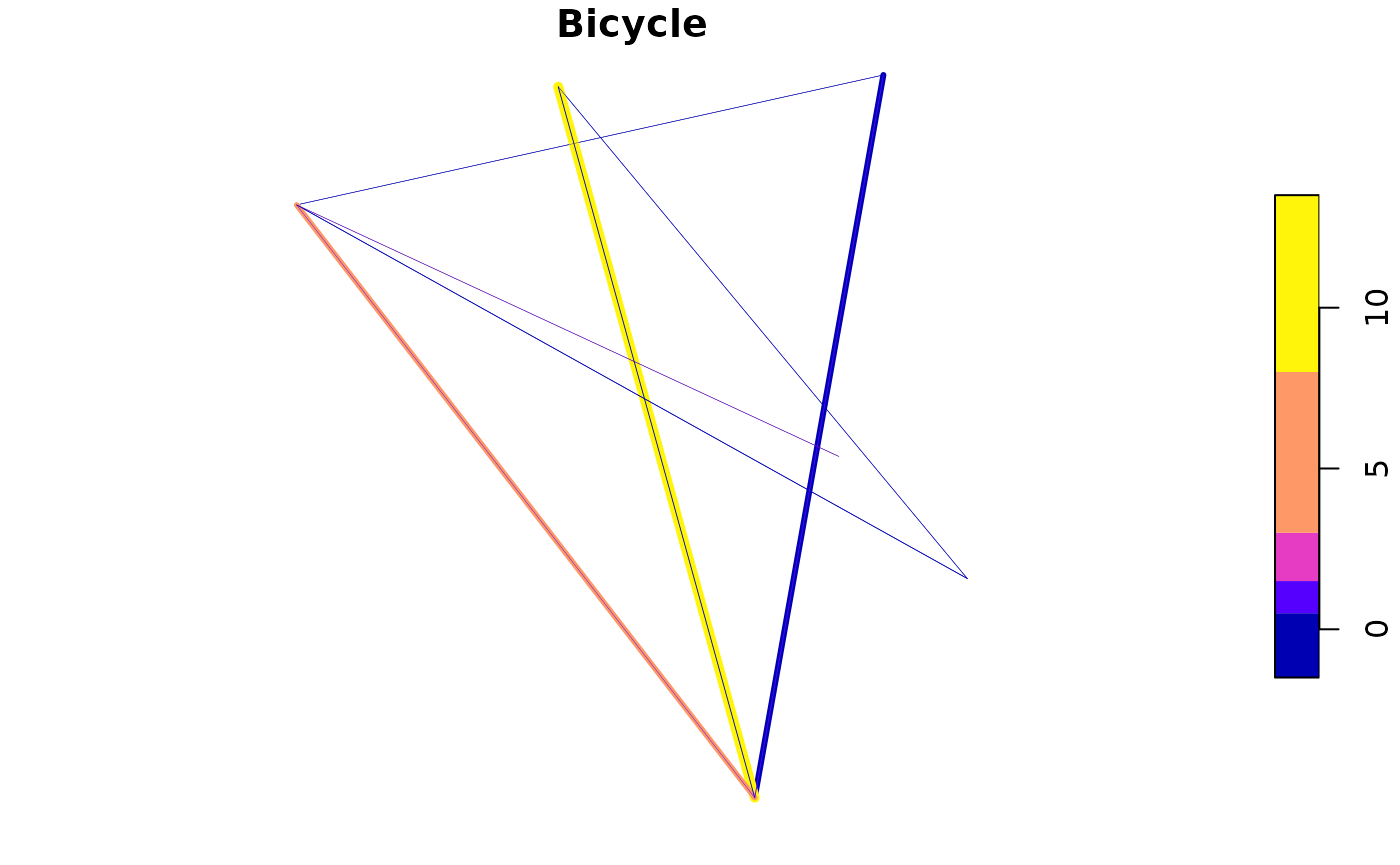
Finally, we can convert these desire lines into routes as follows
(other routing functions can be used, but may require API keys to work -
see the cyclestreets
package documentation for example):
# if the next line returns FALSE the code will not run
r <- route(l = l, route_fun = cyclestreets::journey)These routes contain the same information on origin and destination, but have additional spatial information about the route network. The routes can be plotted in the same way as the desire lines were plotted (we will use the pre-made data for this):
r <- stplanr::routes_fast_sf
plot(r$geometry, lwd = lwd * 3, reset = FALSE)The next stage is to aggregate these lines together to create a ‘route network’. This, and many other functions, are described in the stplanr-paper vignette.
Motivations
As settlements worldwide have grown and become more complex, the process of planning has had to adapt. Planners today are specialists, in sub-fields such as Emergency, Logistics, Healthcare, Urban and Transport Planning. The ‘art’ of planning has become more of a science, with its own array of specialist hardware and software.
Like other types of planning, new technologies are changing and in many ways improving the practice of Transport Planning. Transport interventions such as new bridges, ports and active travel routes are no longer only decided based on the intuition of public sector or political authorities. Decisions are now the result of a long socio-technical process involving public consultation, cost-benefit analyses and computer modeling and visualisation. With the ongoing digital revolution, the importance of this last stage has grown, to the point where transport planning is now a highly technical process, employing dozens of software developers in large planning organizations. There is now a multi-billion pound global transport planning consultancy industry, to support the decision-making process. Yet the results of all this labor are unavailable to the vast majority of citizens worldwide. Transport planning decisions which go against the best available evidence keep getting made.
In this context the aim of stplanr is to provide an accessible toolbox for transport planning, with a focus on geographic data. It is hoped that it will be useful for practitioners and researchers alike, as part of the ongoing transition to open source software taking place in the tech industry.
A further motivation is that the best available evidence suggests the future of civilization depends on our ability to transition away from fossil fuels. The transport sector is the fastest growing source of emissions by sector, and represents a major roadblock in the path towards a zero-carbon economy. Transport systems are also a major cause of ill health, by enabling sedentary lifestyles and causing numerous road traffic casualties. Knowledge of these impacts motivated the word ‘sustainable’ in the package’s name: by focusing on active travel and public transport modes, stplanr is intended to encourage interventions that reduce dependence on fossil fuels.
Further resources
stplanr is focussed on geographic data. The reason for this is that almost all transport data, from the spatial distribution of bus stops to the routes that pedestrians take between home and work, contains a spatial element. Representing this spatial data in a formal class system has many advantages, including sensible defaults for plotting the spatial data on a map and support for a range of geographic operations.
sf supports most common geographic data formats used in transport planning (including Shapefiles and GeoJSON files representing points, lines, zones). See stplanr: A package for transport planning (Lovelace and Ellison 2018) for details.
To get the best out of stplanr it helps to have a strong understanding of spatial data in R in general. Chapter 2 of the open source book Geocomputation with R provides an introductory tutorial on the basics of spatial data with R and contains references to more advanced tutorials which may come in handy as your spatial data analysis skills progress. Further information on geographic data for transport applications can be found in the same book. See https://r.geocompx.org/transport.html.
Contributing
We welcome your contributions, whether it’s filing a bug or feature request in the issue tracker, putting in a pull request to improve performance or documentation, or simply letting us know how you’re using stplanr in your work by citing it or dropping us an email.